 |
| Broken Belts from McGuire Bearing |
 |
| New Belts from Polybelt.com (grey ones are steel reinforced) |
|
| Broken Belts from McGuire Bearing |
|
| New Belts from Polybelt.com (grey ones are steel reinforced) |
 |
| Top View |
 |
| Bottom View |
 | |
| Side View |
 |
| Fabricated Charge Balance Splitter |
 |
| Added DC Power Connector and Balance Connector (left middle) |
 |
| Charger hooked up to the DC connector and balance connector |
 |
| Charger/Power Adapter/Remote |
 |
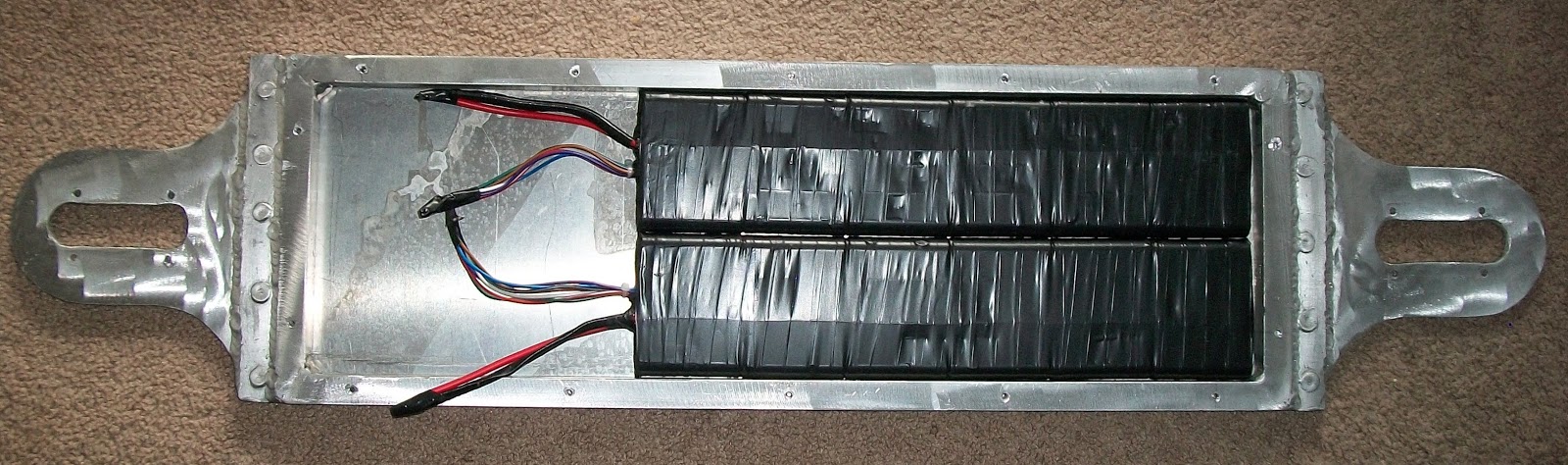
| Bottom of Longboard without cover plate |
 | |
| Bottom of Longboard with Plate (drive end) |
 |
| Bottom of Longboard with Plate off (drive end) |
 |
| Wiring/Receiver/Etc |
 |
| Added Bullet Connectors and JST-XH Connectors to Battery Packs |
 |
| Added Bullet Connectors to the Motor Controllers |
 |
| 5.5mm Gold Plated Bullet Connectors |


 |
| Parts - Pulleys/Washers/Bolts/Belt |
 |
| Parts Bolted to the Wheels |
 |
| Parts Bolted to the Wheels (alt view) |
 |
| Wheels and Motor connected together on the trucks |
 |
| Wheels and Motor connected together on the trucks (alt view) |
 | |
| Small XL (1/5 Pitch) Pulley - 10 Tooth |
 |
| 9" XL (1/5 Pitch) Pulley - 45 Tooth |
 | |
| Large XL (1/5 Pitch) Pulley - 30 Tooth |

 |
| Motor Mounts |
 |
| Motor Mounts (alt view) |
 |
| Mounts with the Motors on them |
 |
| Mounts with Motors on the Trucks |
 |
| Mounts with Motors on the Trucks (alt view) |
 |
| 50mm Brushless Outrunner Motor |
 |
| 3D Rendering Wire Frame |
 |
| 3D Rendering |
 |
| One Side |
 |
| The Other Side |
 | |
| Finished pack wrapped in electrical tape but no connectors. |
 |
| Battery pack in the board. Fits well. |
 |
| Top |
 |
| Top (alt view) |
 |
| Bottom |
 |
| Bottom (alt view) |
 | |
| Top with Top Plate |
 |
| Top with Top Plate (alt view) |
 | |
| Bottom with Bottom Plate |
 |
| Bottom with Bottom Plate (alt view) |